Runtime ConSerts
Finally, using conserts-rs, we have generated various runtime artifacts:
- A ConSerts Submodel
- A ConSerts Runtime Monitor, supporting the intended target runtime:
- Rust applications, without additional modifications
- Bare-metal applications using
#![no_std] - ROS nodes using
rosrust - Other applications using the foreign function interface
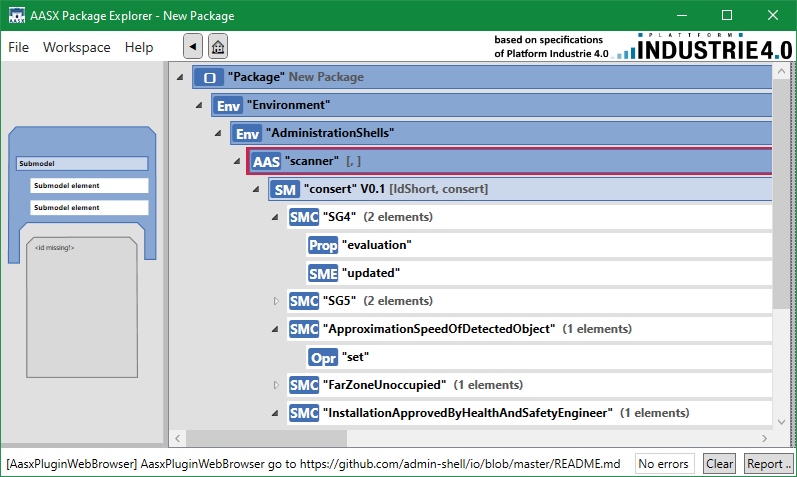
ConSerts Submodel
The following shows the automatically generated, Industry-4.0 compatible, submodel that describes the safety of our laser scanner system.
ConSerts Monitor
#![allow(unused)] fn main() { // properties.rs #[doc = "Approximation Speed of Detected Object X m/s"] #[derive(Clone, Copy, Debug, PartialEq)] pub enum ApproximationSpeedOfDetectedObject { Unknown, Known(uom::si::f64::Velocity), } }
#![allow(unused)] fn main() { // evidence.rs impl RuntimeEvidence { pub fn from(runtime_properties: &RuntimeProperties) -> RuntimeEvidence { // ... let rt_e4 = { use crate::properties::ApproximationSpeedOfDetectedObject::*; match &runtime_properties.approximation_speed_of_detected_object { Unknown => false, Known(value) => { (0f64..=1f64).contains(&value.get::<uom::si::velocity::meter_per_second>()) } } }; // ... } } }
#![allow(unused)] fn main() { // guarantees.rs #[doc = "Far Environment Unoccupied by Humans"] pub struct Sg5; impl Sg5 { pub fn evaluate(runtime_evidence: &RuntimeEvidence) -> bool { { let c0 = { #[doc = "Far Zone Unoccupied."] let c0 = runtime_evidence.rt_e6; #[doc = "Approximation Speed of Detected Object <= 2m/s"] let c1 = runtime_evidence.rt_e7; c0 || c1 }; #[doc = "Installation Approved by Health and Safety Engineer"] let c1 = runtime_evidence.rt_e5; c0 && c1 } } } }
ROS Application Leveraging the Monitor
Note: This is an exemplary deployment using the Robot Operating System (ROS) version 1. ROS1 cannot be used in safety-critical domains, however the approach for developing an application is going to be similar.
The following shows how we can run a ROS monitor in a separate thread and manipulate the runtime properties in the main thread.
Due to monitor.rtp being an Arc<AtomicCell<RuntimeProperties>>, thread-safe access is possible.
Notice that AtomicCell uses compare-and-swap.
In our example, we ignore if this operations fails due to concurrent access.
A different solution would be to implement a bounded number of retry attempts to provide the information.
use consert_edcc2021::ros::RosMonitor; use uom::si::f64::*; use uom::si::frequency::hertz; use uom::si::velocity::meter_per_second; fn main() { let freq = Frequency::new::<hertz>(10); let mut monitor = RosMonitor::new(); let mut rtp = monitor.rtp.clone(); thread::spawn(move || monitor.run_standalone(freq)); loop { // TODO: use actual sensor reading instead of constant let sample = Velocity::new::<meter_per_second>(5.0); let r_old = rtp.load(); let mut r_new = r_old.clone(); r_new.approximation_speed_of_detected_object = ApproximationSpeedOfDetectedObject::Known(sample); rtp.compare_and_swap(r_old, r_new); thread::sleep(Duration::from_millis(100)); } }